
助教
大畑 秀平
KEYWORD農業ロボット、画像認識、省力化
農業機械システム工学
植物工場での情報計測および各種作業支援機能を有した知能ロボット、省エネ型農業機械など、農業を産業として支えるために必要な工学的技術やシステム開発に関する教育研究を行う。

ロボットで農作業を自動化する

助教
大畑 秀平
KEYWORD農業ロボット、画像認識、省力化
農業機械システム工学
植物工場での情報計測および各種作業支援機能を有した知能ロボット、省エネ型農業機械など、農業を産業として支えるために必要な工学的技術やシステム開発に関する教育研究を行う。
農業機械システム工学
植物工場での情報計測および各種作業支援機能を有した知能ロボット、省エネ型農業機械など、農業を産業として支えるために必要な工学的技術やシステム開発に関する教育研究を行う。
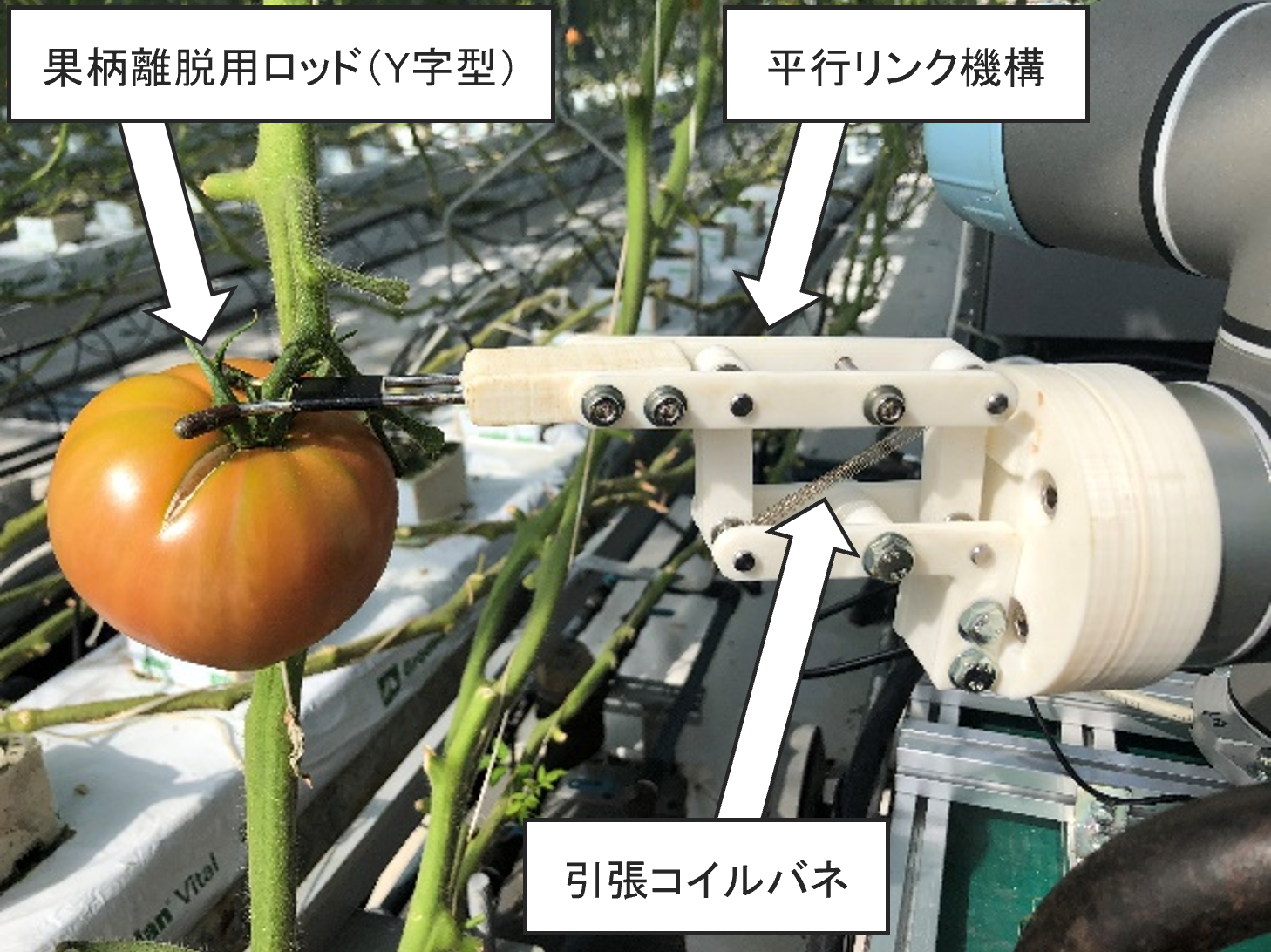
トマトは1つの枝(果柄)に3~5個の実が房状に付きます。さらに、赤くなる時期が実ごとに異なるため、熟した実だけを1つずつ収穫する必要があります。しかし従来の収穫ロボットは、果実を把持するエンドエフェクタ(ハンド)が大型化し、狭い隙間に入り込めず収穫できない場合がありました。そこで、幅3センチほどのY字型ロッドを備えた小型エンドエフェクタを開発しました。平行リンク機構によりロッド先端が上下に追従するため、多少の認識誤差があっても小果柄へ挿入できます。ロボットの手首を回すと離層に力が加わり、実を傷つけずポロッと収穫できます。試験では奥まった果実も含め50果中45果を収穫することに成功しました。
カメラに映る奥の葉や隣レーンの果実をAIが本来のターゲットと誤認し、間違った収穫指示を出してしまうことが従来の課題でした。さらに施設ごとに背景が変わると精度が落ち、学習モデルを作り直す負担も問題でした。そこで深度カメラで得た三次元画像から培地スラブの天面を自動検出し、その面より奥を削除する手法を開発しました。手前の果実だけを抽出した画像で学習することで見落としと誤検出を抑え、別施設でも高精度を維持できました。葉や支柱が入り組む温室でも同じ原理で使えるため、ピーマンやイチゴなどへの応用も容易です。現在は小果柄位置の推定にも取り組み、完全自律収穫を目指しています。
